Esta página es seguramente la explicación más completa que existe de la matriz Hessiana. Aquí se explica el concepto de matriz Hessiana, cómo calcularla con ejemplos e incluso hay varios ejercicios resueltos para que puedas practicar. Además, podrás aprender cómo se calculan los máximos y los mínimos de una función con más de una variable, así como saber si se trata de una función cóncava o convexa. Y, por último, también encontrarás las utilidades y las aplicaciones que tiene la matriz Hessiana.
¿Qué es la matriz Hessiana?
La definición de la matriz Hessiana (o Hessiano) es la siguiente:
La matriz Hessiana es una matriz cuadrada de dimensión n×n compuesta por las segundas derivadas parciales de una función de n variables.
A esta matriz también se la conoce como Hessiano, o incluso en algún libro de matemáticas se nombra como Discriminante. Pero la forma más habitual de llamarla es matriz Hessiana.
De manera que la fórmula de la matriz Hessiana es la siguiente:
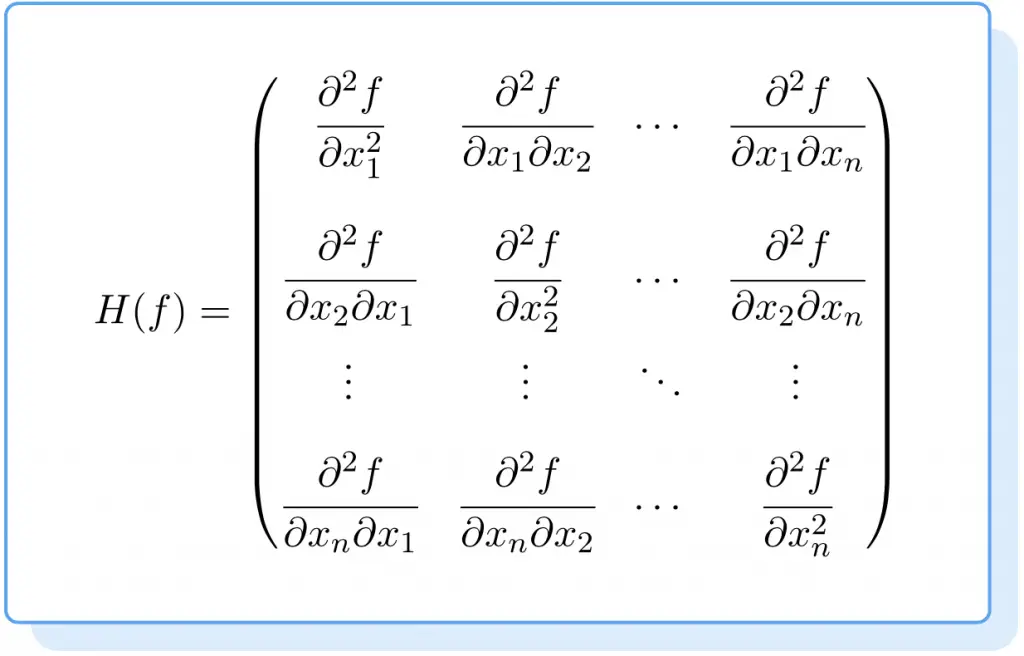
Por tanto, la matriz Hessiana siempre será una matriz cuadrada cuya dimensión será igual al número de variables de la función. Por ejemplo, si la función tiene 3 variables la matriz Hessiana será de dimensión 3×3.
Además, el teorema de Schwarz (o teorema de Clairaut) dice que no importa el orden de derivación, es decir, derivar parcialmente primero respecto la variable  y después respecto la variable
y después respecto la variable  es lo mismo que derivar parcialmente primero respecto y luego respecto .
es lo mismo que derivar parcialmente primero respecto y luego respecto .

Por lo tanto, la matriz Hessiana es una matriz simétrica, o dicho de otra forma, tiene una simetría cuyo eje es su diagonal principal.
Como curiosidad, la matriz Hessiana recibe este nombre en honor a Ludwig Otto Hesse, un matemático alemán del siglo XIX que hizo contribuciones muy importantes en el campo del álgebra lineal.
Ejemplo de cómo calcular la matriz Hessiana
Vamos a ver un ejemplo de cómo hallar una matriz Hessiana de dimensión 2×2:
- Calcula la matriz Hessiana en el punto (1,0) de la siguiente función:

Primero de todo tenemos que calcular las derivadas parciales de primer orden:


Una vez ya sabemos las primeras derivadas, calculamos todas las derivadas parciales de segundo orden:



Por lo tanto, ahora ya podemos hallar la matriz Hessiana a partir de la fórmula para matrices 2×2:
![\displaystyle H_f (x,y)=\begin{pmatrix}\cfrac{\partial^2 f}{\partial x^2} & \cfrac{\partial^2 f}{\partial x \partial y} \\[4ex] \cfrac{\partial^2 f}{\partial y \partial x} & \cfrac{\partial^2 f}{\partial y^2} \end{pmatrix}](https://www.matricesydeterminantes.com/wp-content/ql-cache/quicklatex.com-977a4fa1cef38dcce5611db472ffd9df_l3.svg "Rendered by QuickLaTeX.com")
![\displaystyle H_f (x,y)=\begin{pmatrix}6x +6 &-4 \\[2ex] -4 & 12y^2+8 \end{pmatrix}](https://www.matricesydeterminantes.com/wp-content/ql-cache/quicklatex.com-b6602a2e9cce95aff09187cb8317c956_l3.svg "Rendered by QuickLaTeX.com")
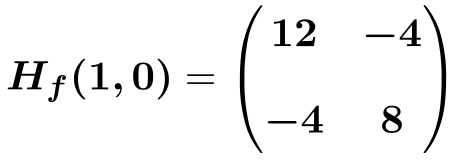
De manera que la matriz Hessiana evaluada en el punto (1,0) será:
![\displaystyle H_f (1,0)=\begin{pmatrix}6(1) +6 &-4 \\[2ex] -4 & 12(0)^2+8 \end{pmatrix}](https://www.matricesydeterminantes.com/wp-content/ql-cache/quicklatex.com-33543a1b6ec623326feafd947dbad8be_l3.svg "Rendered by QuickLaTeX.com")
Ejercicios resueltos de matrices Hessianas
Ejercicio 1
Calcula la matriz Hessiana de la siguiente función con 2 variables en el punto (1,1):

Antes de nada, debemos hallar las derivadas parciales de primer orden de la función:


Una vez ya hemos calculado las primeras derivadas, pasamos a resolver todas las derivadas parciales de segundo orden:



Así que la matriz Hessiana queda definida de la siguiente manera:
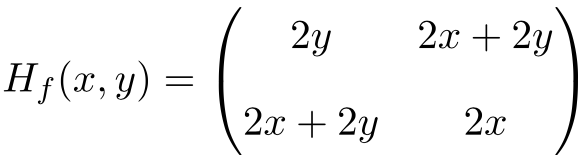
Finalmente, solo queda evaluar la matriz Hessiana en el punto (1,1):
![\displaystyle H_f (1,1)=\begin{pmatrix}2\cdot 1 &2 \cdot 1+2\cdot 1 \\[1.5ex] 2\cdot 1+2\cdot 1 & 2\cdot 1 \end{pmatrix}](https://www.matricesydeterminantes.com/wp-content/ql-cache/quicklatex.com-9cc070767a09c7896168f02c9e249387_l3.svg "Rendered by QuickLaTeX.com")
![\displaystyle \bm{H_f (1,1)}=\begin{pmatrix}\bm{2} & \bm{4} \\[1.1ex] \bm{4} & \bm{2} \end{pmatrix}](https://www.matricesydeterminantes.com/wp-content/ql-cache/quicklatex.com-7a95c3a2e4c74893b740d15c30ea7f72_l3.svg "Rendered by QuickLaTeX.com")
Ejercicio 2
Calcula el Hessiano en el punto (1,1) de la siguiente función con dos variables:

Primero de todo debemos calcular las derivadas parciales de primer orden de la función:


Una vez tenemos las primeras derivadas, calculamos las derivadas parciales de segundo orden de la función:



Así que la matriz Hessiana de la función es una matriz cuadrada de dimensión 2×2:
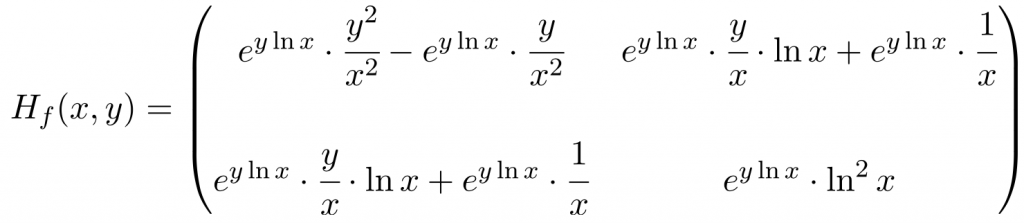
Finalmente, solo queda evaluar la matriz Hessiana en el punto (1,1):
![\displaystyle H_f (1,1)=\begin{pmatrix} e^{1\ln (1)} \displaystyle \cdot \cfrac{1^2}{1^2} - e^{1\ln (1)} \cdot \cfrac{1}{1^2}& e^{1\ln (1)} \cdot \cfrac{1}{1}\cdot \ln (1) + e^{1\ln (1)}\cdot \cfrac{1}{1} \\[3ex] e^{1\ln (1)} \cdot \cfrac{1}{1}\cdot \ln (1) + e^{1\ln (1)}\cdot \cfrac{1}{1} & e^{1\ln (1)} \cdot \ln ^2 (1) \end{pmatrix}](https://www.matricesydeterminantes.com/wp-content/ql-cache/quicklatex.com-8055ae2fe017c2b027e118f6f9725658_l3.svg "Rendered by QuickLaTeX.com")
![\displaystyle H_f (1,1)=\begin{pmatrix}e^{0} \cdot 1 - e^{0} \cdot 1& e^{0} \cdot 1\cdot 0 + e^{0}\cdot 1 \\[2ex] e^{0} \cdot 1\cdot 0 + e^{0}\cdot 1 & e^{0} \cdot 0\end{pmatrix}](https://www.matricesydeterminantes.com/wp-content/ql-cache/quicklatex.com-d58808558ae86d9eacf8dc097475cf6c_l3.svg "Rendered by QuickLaTeX.com")
![\displaystyle H_f (1,1)=\begin{pmatrix}1 - 1& 0+ 1 \\[1.5ex] 0 +1 & 1 \cdot 0\end{pmatrix}](https://www.matricesydeterminantes.com/wp-content/ql-cache/quicklatex.com-e18c3bf8cdf52cc5ac9adf2f7a600c41_l3.svg "Rendered by QuickLaTeX.com")
![\displaystyle \bm{H_f (1,1)}=\begin{pmatrix}\bm{0} & \bm{1} \\[1.1ex] \bm{1} & \bm{0} \end{pmatrix}](https://www.matricesydeterminantes.com/wp-content/ql-cache/quicklatex.com-b6d02d2b4af857382d51b681f830f033_l3.svg "Rendered by QuickLaTeX.com")
Ejercicio 3
Halla la matriz Hessiana en el punto  de la siguiente función con 3 variables:
de la siguiente función con 3 variables:

En primer lugar, calculamos las derivadas parciales de primer orden de la función:



Una vez tenemos las primeras derivadas, calculamos las derivadas parciales de segundo orden de la función:






De modo que la matriz Hessiana de la función es una matriz cuadrada de dimensión 3×3:

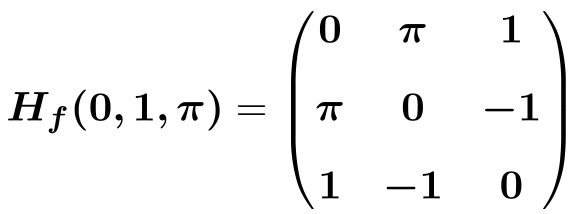
Por último, sustituimos las variables por sus respectivos valores en el punto 
![\displaystyle H_f(0,1,\pi)=\begin{pmatrix}e^{-0}\cdot \text{sen}(1\pi) & -\pi e^{-0}\cdot \text{cos}(1\pi) &-1e^{-0}\cdot \text{cos}(1\pi) \\[1.5ex] -\pi e^{-0}\cdot \text{cos}(1 \pi)&-\pi^2e^{-0}\cdot \text{sen}(1 \pi) &e^{-0}\cdot \text{cos}(1 \pi)-1 \pi e^{-0}\cdot \text{sen}(1 \pi) \\[1.5ex] -1e^{-0}\cdot \text{cos}(1 \pi)& e^{-0}\cdot \text{cos}(1 \pi)-1 \pi e^{-0}\cdot \text{sen}(1 \pi)& -1^2e^{-0}\cdot \text{sen}(1 \pi) \end{pmatrix}](https://www.matricesydeterminantes.com/wp-content/ql-cache/quicklatex.com-77e70e2faa91e376f2f89d3be3aa40ec_l3.svg "Rendered by QuickLaTeX.com")
![\displaystyle H_f(0,1,\pi)=\begin{pmatrix}1\cdot 0 & -\pi \cdot 1 \cdot (-1)&-1\cdot 1 \cdot (-1) \\[1.5ex] -\pi \cdot 1 \cdot (-1) &-\pi^2\cdot 1\cdot 0 &1 \cdot (-1)-\pi \cdot 1\cdot 0 \\[1.5ex] -1\cdot 1 \cdot (-1) & 1\cdot (-1) - \pi \cdot 1\cdot 0 & -1\cdot 1 \cdot 0 \end{pmatrix}](https://www.matricesydeterminantes.com/wp-content/ql-cache/quicklatex.com-ce482239fc967e2d9265637b9e19807e_l3.svg "Rendered by QuickLaTeX.com")
Ejercicio 4
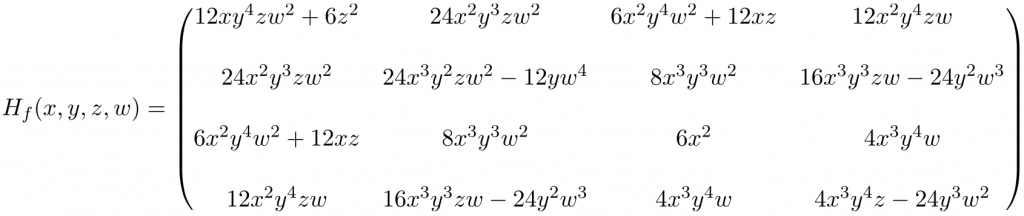
Determina la matriz Hessiana en el punto (2,-1,1,-1) de la siguiente función con 4 variables:

El primer paso es hallar las derivadas parciales de primer orden de la función:




Ahora resolvemos las derivadas parciales de segundo orden de la función:










De manera que la expresión de la matriz Hessiana 4×4 que se obtiene al resolver todas las derivadas parciales es la siguiente:
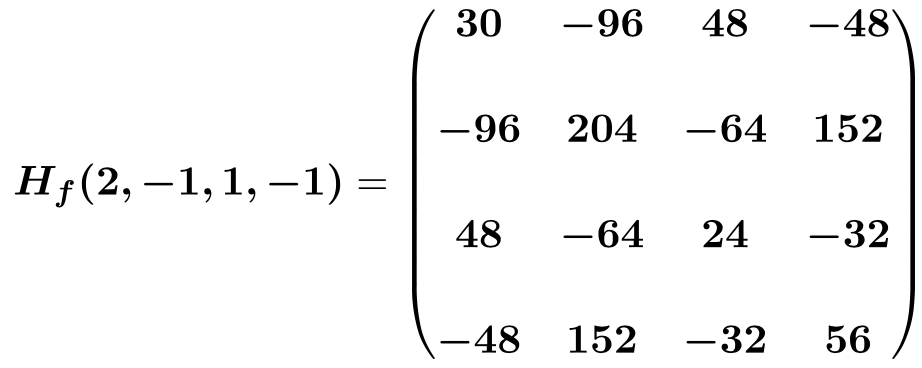
Finalmente, sustituimos las incógnitas por sus respectivos valores del punto (2,-1,1,-1) y hacemos los cálculos:
¿Cómo saber cuándo la matriz Hessiana es definida positiva, negativa o indefinida?
Como veremos más adelante, saber si la matriz Hessiana es una matriz semidefinida positiva, definida positiva, semidefinida negativa, definida negativa o indefinida tiene una gran utilidad. Así que vamos a ver cómo lo podemos averiguar:
Criterio de los valores propios (o autovalores)
Una forma de saber qué tipo de matriz se trata es a través del los valores propios (o autovalores) de la matriz Hessiana:
- La matriz Hessiana es semidefinida positiva si tiene valores propios (o autovalores) que son iguales y más grandes que cero. Es decir tiene valores propios positivos y, como mínimo, uno que es igual a 0:

- La matriz Hessiana es definida positiva si todos sus valores propios (o autovalores) son exclusivamente más grande que 0 (positivos):

- La matriz Hessiana es semidefinida negativa si tiene valores propios (o autovalores) que son iguales y más pequeños que cero. Es decir tiene valores propios negativos y, como mínimo, uno que es igual a 0:

- La matriz Hessiana es definida negativa si todos sus valores propios (o autovalores) son solamente más pequeños que 0 (negativos):

- La matriz Hessiana es indefinida cuando tiene valores propios (o autovalores) positivos y negativos:

Criterio de Sylvester
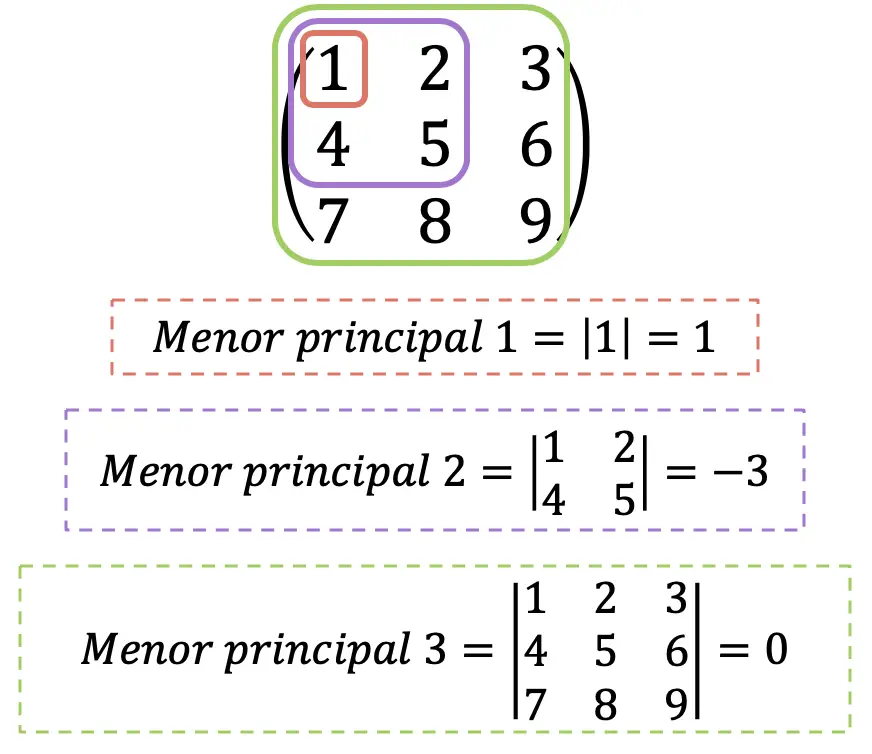
Otra manera de saber de qué tipo es la matriz Hessiana es mediante el criterio de Sylvester, aunque este teorema solo permite saber si es definida positiva, definida negativa o indefinida. Pero a veces puede resultar mucho más rápido de utilizar ya que los cálculos suelen ser más fáciles.
Así pues, el criterio de Sylvester dice lo siguiente:
- Si todos los menores principales de la matriz Hessiana son mayores que 0, se trata de una matriz definida positiva.
- Si los menores principales de la matriz Hessiana de índice par son mayores que 0 y los de índice impar son menores que 0, se trata de una matriz definida negativa.
- Si todos los menores principales de la matriz Hessiana son distintos de 0 y no se cumple ninguna condición de las dos anteriores, se trata de una matriz indefinida.
Obviamente, el menor principal máximo de la matriz Hessiana siempre coincidirá con su determinante. Como dato meramente informativo, al determinante de la matriz Hessiana también se le conoce como «el Hessiano», aunque aquí no lo haremos para no crear confusiones.
Cómo calcular un máximo o un mínimo de una función con la matriz Hessiana
Una vez ya sabes calcular la matriz Hessiana, seguro que te estás preguntado: ¿y para qué sirve esta matriz?
Pues una de las aplicaciones de la matriz Hessiana es hallar el máximo o el mínimo de una función con más de una variable. A continuación se explica paso a paso cómo es el método para calcular los máximos y los mínimos:
- Primero se calculan los puntos críticos de la función multivariable. Para ello, calculamos el gradiente o la matriz jacobiana de la función, lo igualamos a 0 y resolvemos las ecuaciones.
- Se calcula la matriz Hessiana.
- Se sustituyen los puntos críticos encontrados en el paso 1 en la matriz Hessiana. De este modo obtendremos tantas matrices Hessianas como puntos críticos tenga la función.
- Miramos qué tipo de matriz es cada matriz Hessiana. Es decir, miramos si es definida positiva, definida negativa, indefinida, etc.
- Si la matriz Hessiana es definida positiva, el punto crítico es un mínimo relativo de la función.
- Si la matriz Hessiana es definida negativa, el punto crítico es un máximo relativo de la función.
- Si la matriz Hessiana es indefinida, el punto crítico es un punto de silla.
Ejemplo de cálculo de máximos y mínimos de una función multivariable
Para ver cómo se hace, a continuación dispones de un ejemplo de cómo calcular y clasificar los extremos relativos de una función mediante la matriz Hessiana:
- Calcula todos los extremos relativos de la siguiente función multivariable:

Lo primero que debemos hacer es calcular la matriz Jacobiana de la función, que en este caso coincidirá con el gradiente porque es una función escalar:

Ahora tenemos que determinar los puntos críticos, para ello igualamos las ecuaciones obtenidas a 0 y resolvemos el sistema de ecuaciones:

![\displaystyle \left. \begin{array}{l} 2x+2y+4 =0 \\[2ex] -2y+2x-4=0 \end{array}\right\} \longrightarrow \left. \begin{array}{c} x = 0 \\[1.1ex] y = -2 \end{array}\right\} \longrightarrow \ (0,-2)](https://www.matricesydeterminantes.com/wp-content/ql-cache/quicklatex.com-3aa6b2fd906207329e8aaf54bb66c7bc_l3.svg "Rendered by QuickLaTeX.com")
Así que el punto crítico que hemos encontrado es (0,-2).
Una vez hallado el punto crítico de la función, debemos calcular la matriz Hessiana:
![\displaystyle H_f (x,y)=\begin{pmatrix}2 & 2 \\[1.1ex] 2 & -2 \end{pmatrix}](https://www.matricesydeterminantes.com/wp-content/ql-cache/quicklatex.com-f859b109ebdf258c73013e66c2e50636_l3.svg "Rendered by QuickLaTeX.com")
Y, evidentemente, la matriz Hessiana evaluada en el punto crítico es la misma:
![\displaystyle H_f (0,-2)=\begin{pmatrix}2 & 2 \\[1.1ex] 2 & -2 \end{pmatrix}](https://www.matricesydeterminantes.com/wp-content/ql-cache/quicklatex.com-7d770597f27eefdbf6819b8e3a06e155_l3.svg "Rendered by QuickLaTeX.com")
Para ver qué tipo de matriz es, utilizaremos el criterio de Sylvester. Así que resolvemos los menores principales de la matriz:

![\displaystyle \begin{vmatrix}2 & 2 \\[1.1ex] 2 & -2 \end{vmatrix} = -8](https://www.matricesydeterminantes.com/wp-content/ql-cache/quicklatex.com-5179360b4db8c8164cbd6c770dece60a_l3.svg "Rendered by QuickLaTeX.com")
El menor principal 1 (impar) es positivo y el menor principal 2 (par) es negativo, por lo que según el criterio de Sylvester se trata de una matriz indefinida. Y, por tanto, el punto crítico (0,-2) es un punto de silla.
Determinar la concavidad o convexidad de una función con la matriz Hessiana
Otra utilidad de la matriz Hessiana es saber si una función es cóncava o convexa. Y esto se puede determinar según el siguiente teorema:
Sea  un conjunto abierto y
un conjunto abierto y  una función cuyas segundas derivadas son continuas, su concavidad y convexidad viene definida por la matriz Hessiana:
una función cuyas segundas derivadas son continuas, su concavidad y convexidad viene definida por la matriz Hessiana:
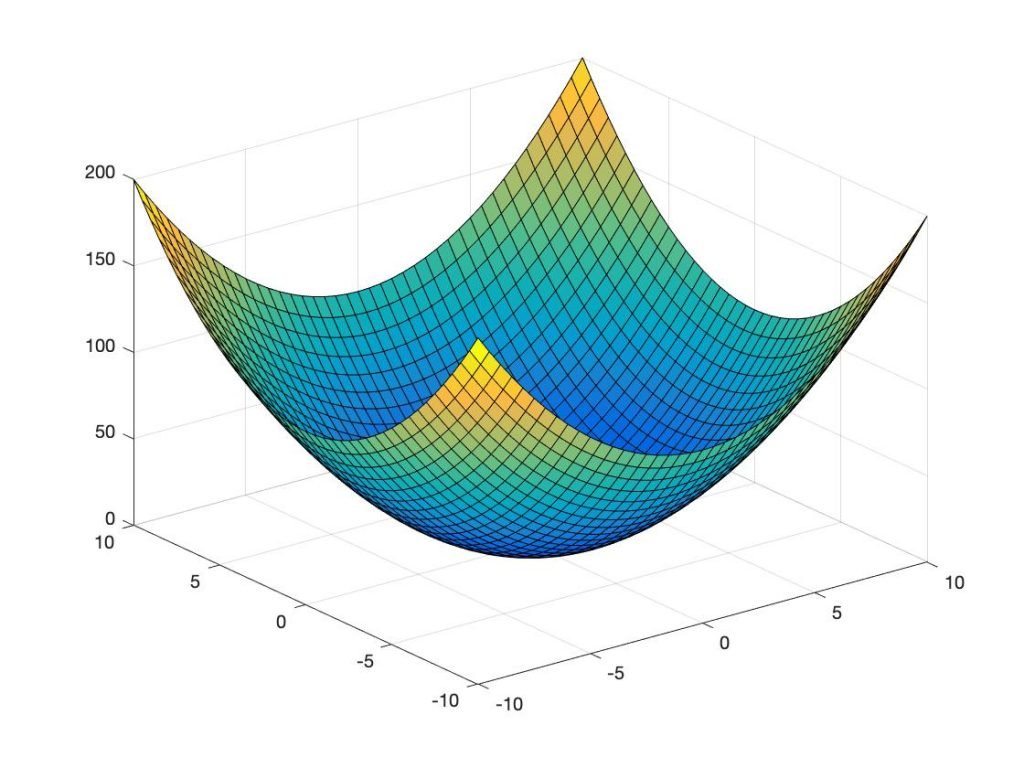
- La función
 es convexa en el conjunto
es convexa en el conjunto  si y solo si su matriz Hessiana es semidefinida positiva en todos los puntos del conjunto.
si y solo si su matriz Hessiana es semidefinida positiva en todos los puntos del conjunto. - La función es estrictamente convexa en el conjunto si y solo si su matriz Hessiana es definida positiva en todos los puntos del conjunto.
✓ Por tanto, si es una función convexa en un punto donde además se anula la matriz Jacobiana, ese punto es un mínimo local.
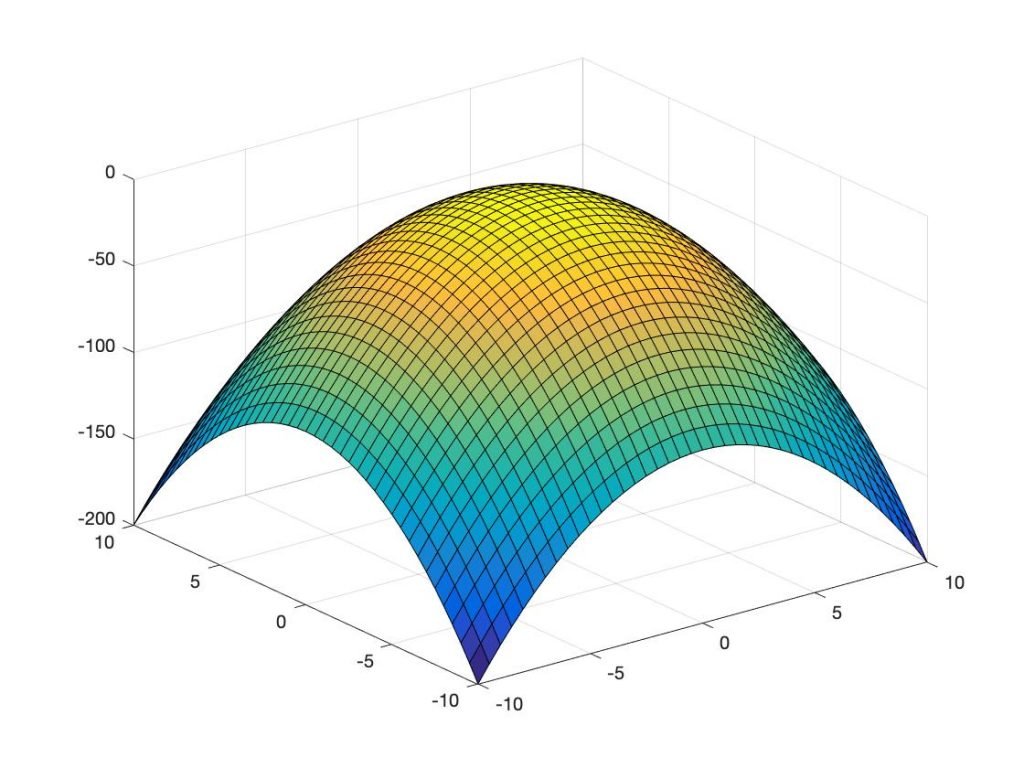
- La función es cóncava en el conjunto si y solo si su matriz Hessiana es semidefinida negativa en todos los puntos del conjunto.
- La función es estrictamente cóncava en el conjunto si y solo si su matriz Hessiana es definida negativa en todos los puntos del conjunto.
✓ Por tanto, si es una función cóncava en un punto donde además se anula la matriz Jacobiana, ese punto es un máximo local.
A continuación tienes un ejemplo de una función convexa y otro de una función cóncava representadas en un espacio de 3 dimensiones:
Función cóncava
Más aplicaciones de la matriz Hessiana
Las principales utilidades de la matriz Hessiana son las que ya hemos visto, sin embargo, también tiene algunas aplicaciones más. Las explicamos a continuación para los más curiosos.
Polinomio de Taylor
El desarrollo del polinomio de Taylor para funciones de 2 o más variables en el punto  empieza de la siguiente manera:
empieza de la siguiente manera:

Como puedes ver, los términos de segundo orden de la expansión de Taylor vienen dados por la matriz Hessiana evaluada en el punto de desarrollo del polinomio.
Matriz Hessiana Orlada
Otro uso de la matriz Hessiana es calcular los mínimos y máximos de una función multivariable  restringida a otra función
restringida a otra función  . Para resolver este problema se emplea la matriz Hessiana orlada y se sigue el siguiente procedimiento:
. Para resolver este problema se emplea la matriz Hessiana orlada y se sigue el siguiente procedimiento:
Paso 1: Se calcula la función de Lagrange, que viene definida por la siguiente expresión:

Paso 2: Se hallan los puntos críticos de la función de Lagrange. Para ello, calculamos el gradiente de la función de Lagrange, igualamos las ecuaciones a 0 y resolvemos las ecuaciones.


Paso 3: Para cada punto que hemos encontrado calculamos el Hessiano orlado, que viene definido por la siguiente matriz:
![\displaystyle H(f,g) = \begin{pmatrix}0 & \cfrac{\partial g}{\partial x_1} & \cfrac{\partial g}{\partial x_2} & \cdots & \cfrac{\partial g}{\partial x_n} \\[4ex] \cfrac{\partial g}{\partial x_1} & \cfrac{\partial^2 f}{\partial x_1^2} & \cfrac{\partial^2 f}{\partial x_1\,\partial x_2} & \cdots & \cfrac{\partial^2 f}{\partial x_1\,\partial x_n} \\[4ex] \cfrac{\partial g}{\partial x_2} & \cfrac{\partial^2 f}{\partial x_2\,\partial x_1} & \cfrac{\partial^2 f}{\partial x_2^2} & \cdots & \cfrac{\partial^2 f}{\partial x_2\,\partial x_n} \\[3ex] \vdots & \vdots & \vdots & \ddots & \vdots \\[3ex] \cfrac{\partial g}{\partial x_n} & \cfrac{\partial^2 f}{\partial x_n\,\partial x_1} & \cfrac{\partial^2 f}{\partial x_n\,\partial x_2} & \cdots & \cfrac{\partial^2 f}{\partial x_n^2}\end{pmatrix}](https://www.matricesydeterminantes.com/wp-content/ql-cache/quicklatex.com-0a1efebcd871d9c5c24184e4ef6b6e5a_l3.svg "Rendered by QuickLaTeX.com")
Paso 4: Determinamos por cada punto crítico si se trata de un máximo o un mínimo:
- Se tratará de un máximo local de la función bajo las restricciones de la función
 si los últimos n-m (donde n es el número de variables y m el numéro de restricciones) menores principales de la matriz Hessiana orlada evaluados en el punto crítico tienen signos alternados empezando con el signo negativo.
si los últimos n-m (donde n es el número de variables y m el numéro de restricciones) menores principales de la matriz Hessiana orlada evaluados en el punto crítico tienen signos alternados empezando con el signo negativo.
- Se tratará de un mínimo local de la función bajo las restricciones de la función si los últimos n-m (donde n es el número de variables y m el número de restricciones) menores principales de la matriz Hessiana orlada evaluados en el punto crítico tienen todos signos negativos.
Hay que tener presente que los mínimos o máximos relativos de una función restringida a otra no tienen porque serlo de la función sin restringir. De manera que la matriz Hessiana orlada únicamente sirve para este tipo de problemas.
Relación con otras operaciones
Finalmente, la matriz Hessiana también tiene relación con otras operaciones o matrices importantes, principalmente con la matriz Jacobiana y con el operador de Laplace.
Relación con la matriz Jacobiana
La matriz Hessiana de una función es la matriz Jacobiana del gradiente de la misma función:

Operador de Laplace
La traza de la matriz Hessiana es equivalente al operador de Laplace:

Esta igualdad se puede demostrar fácilmente, ya que la definición del operador de Laplace es la divergencia del gradiente de una función:

Por lo tanto su expresión es:

Y esta suma es justo la traza de la matriz Hessiana, por lo que queda demostrada la equivalencia.
Una duda,
En un ejercicio de Hessiano me salio que la 2da derivada de x con respecto a x era igual a cero, el determinante era de 3×3 y me dio positivo, el libro decía que era un maximo pero no lo he visto definido en ningún lado, ya que cuando el determinante da positivo puede ser minimo o maximo y hay que ver el valor de la 2da derivada de x con respecto a x.
Gracias de antemano!
Hola Javier, no acabo de entender tu problema del todo, ¿podrías escribir la función?
De todas formas, para saber si se trata de un máximo o un mínimo debes estudiar si la matriz es definida positiva o definida negativa. Más arriba tienes la explicación de cómo saber cuándo una matriz es definida positiva, definida negativa o indefinida.
Espero tu respuesta para poder ayudarte 🙂
Hay un error en la parte «Cómo calcular un máximo o un mínimo de una función con la matriz Hessiana». Decís que si la matriz es definida positiva es un máximo relativo y si es definida negativa es un mínimo relativo cuando es al revés. Si la hessiana es definida positiva entonces es un mínimo relativo y si es definida negativa un máximo relativo.
Toda la razón Mario, había un error en esa parte. Ya lo hemos corregido.
¡Gracias por tu aportación Mario!
si la función es de una sola variable es posible calcular el gradiente y la matriz hessiana ?
Sí Jhonatan, si la función solamente tiene una variable también se puede calcular su gradiente y su matriz Hessiana, pero entonces el gradiente será simplemente la primera derivada de la función y la Hessiana será la segunda derivada de la función.
Se puede expresar la función como la multiplicación entre la matriz jacobiana y la matriz hessiana?
No, en general no Sonia.
Puedes ver la relación entre la matriz Jacobiana y la matriz Hessiana en la explicación. También puedes ver más información al respecto en nuestro post sobre la matriz Jacobiana.
Que tipo de análisis se debe hacer cuando el determinante Hessiano sale cero (Δ=0)
Hola Freddy, para saber si el punto es un mínimo, un máximo o un punto de silla no debemos mirar el valor del determinante de la matriz Hessiana, sino que lo importante es calcular sus valores propios (autovalores). Por lo tanto, para poder hacer correctamente el análisis debes hallar los valores propios de la matriz.